Overview
Learn Reinforcement Learning
What is Reinforcement Learning?
Unlike supervised learning, where the model learns from labeled data, or unsupervised learning, which finds patterns in unlabeled data, reinforcement learning is about learning through trial and error. An agent interacts with an environment and learns a policy to maximize cumulative reward over time.
What are the Real World Applications of RL?
RL is used in robotics (autonomous control), game AI (like AlphaGo), finance (trading strategies), healthcare (treatment planning), and recommendation systems (personalized content delivery), among others.
What is an Agent in Reinforcement Learning?
In reinforcement learning, an agent is the entity that makes decisions by interacting with an environment. It observes the current state, takes an action based on a learned policy, and receives feedback in the form of a reward and the next state. The agent's goal is to learn a strategy that maximizes cumulative rewards over time through trial and error.
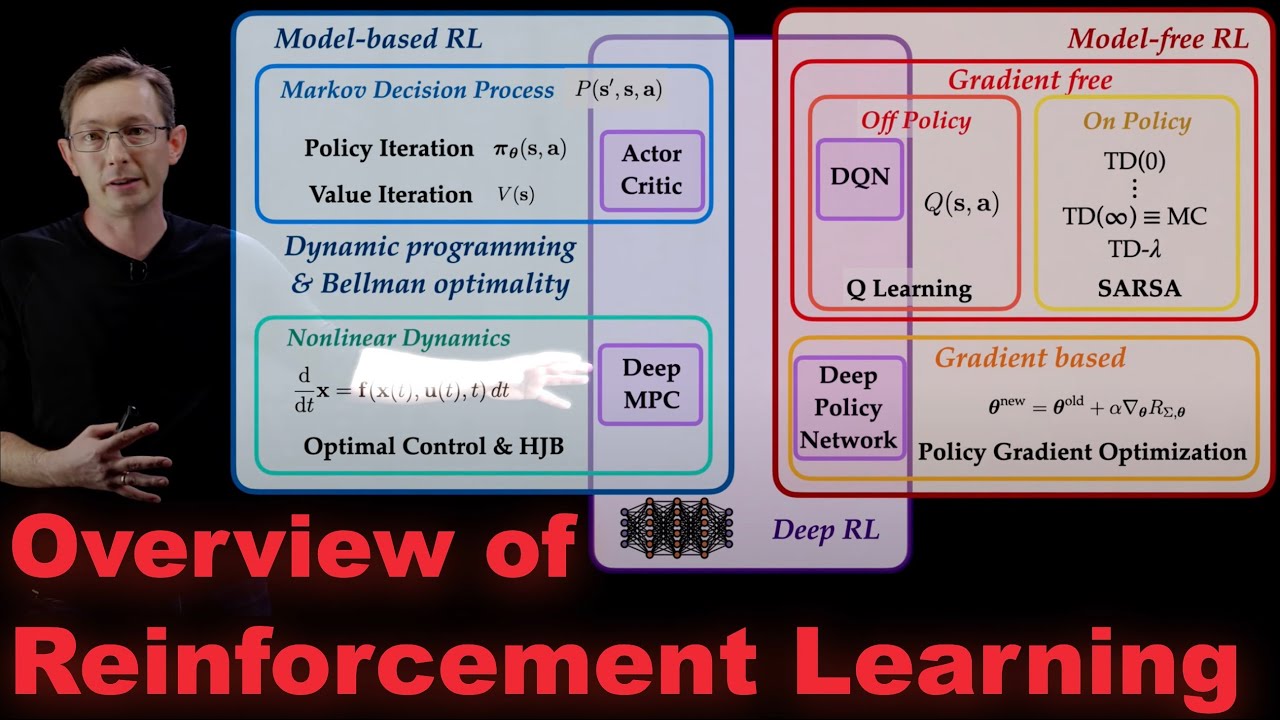
Algorithms
Find the Different RL Algorithms
Learning Hub
Take a Look Into Our

MIT
RL Game Models

RL Stanford Book
Advanced
Pathways
Learn Reinforcement Learning
Education

MIT

UC Berkeley

Carnegie Mellon
Stanford University
Georgia Tech
Career Pathways

RL Research Scientist

Robotics Engineer

Autonomous Vehicle Engineer
Logistics Optimization Engineer

Healthcare Data Scientists



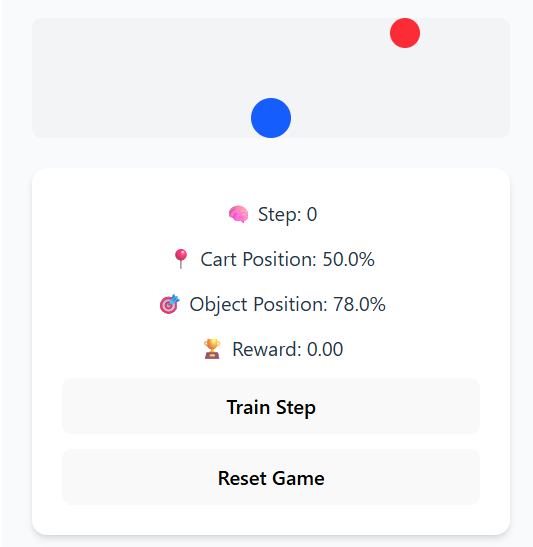
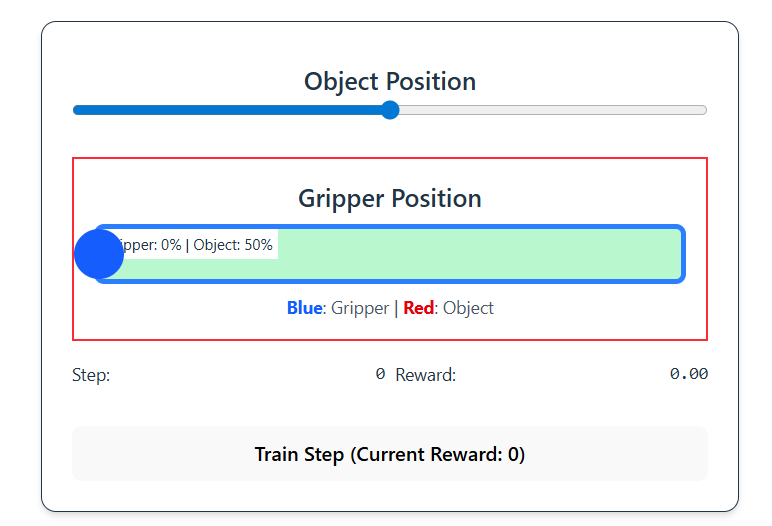
Reinforcement Playground
Try out a Reinforcement Learning Agents
Github RL Projects
Open Source Github Projects
Git Projects
Open Source Github Projects
Learning Projects
RL Math Textbook
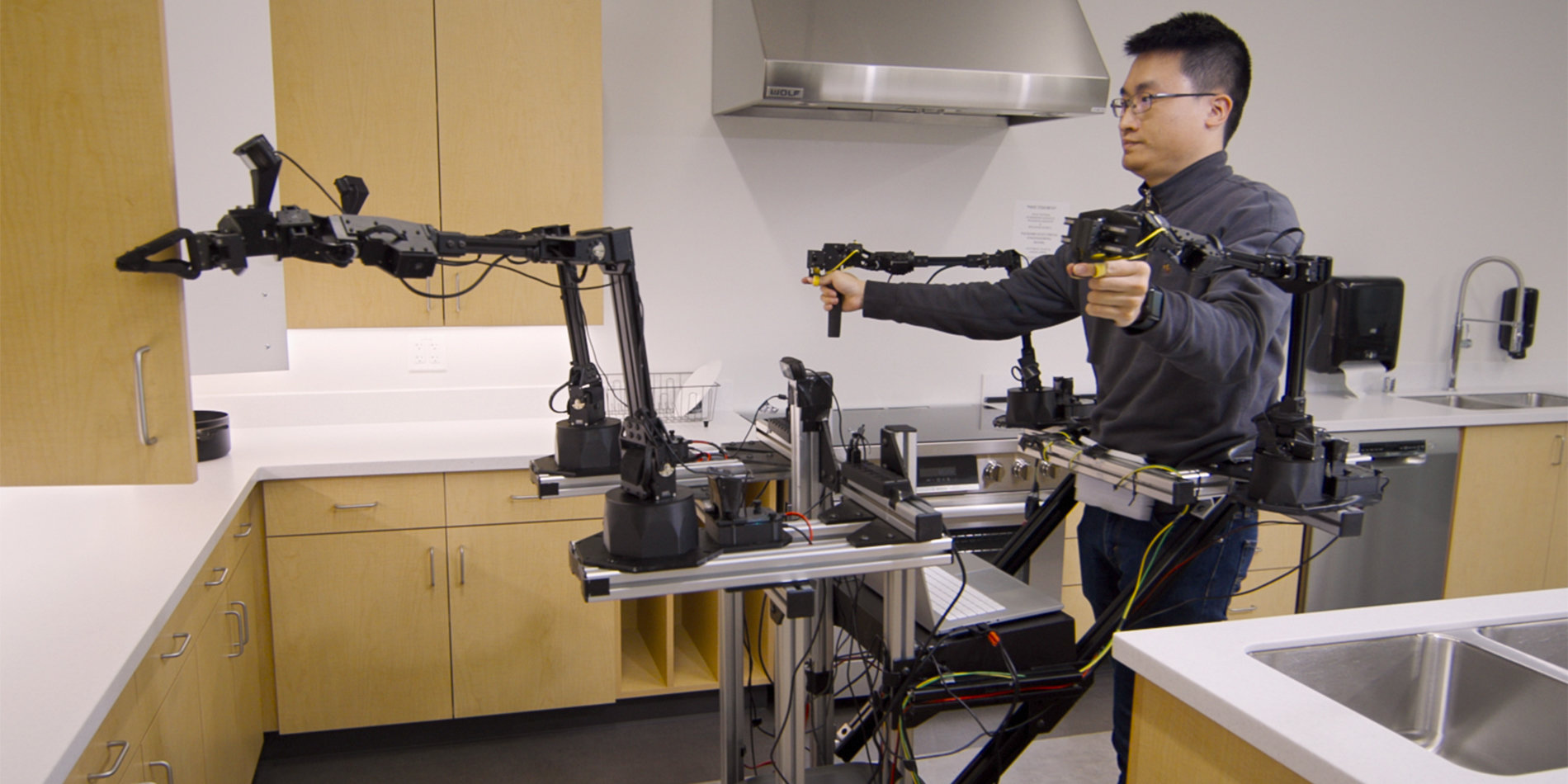
Robotics Simulations
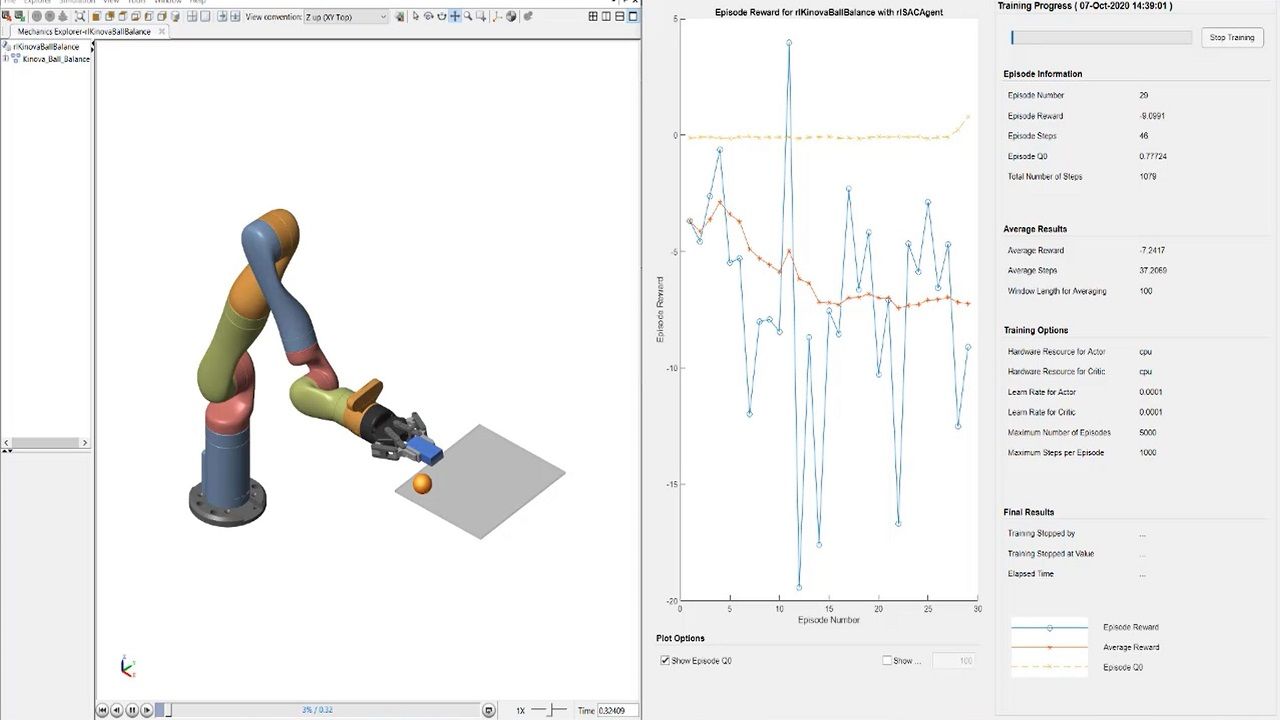
Train in Physics Based Environment
Why Simulation?
Simulating a robot before real performance on a physical robot is crucial for testing and development. Deploying a reinforcement learning policy and tuning your robot to in a simulative environment allow you to mimic real world scenarios and test different situations through computation over real-life testing. These can be run in parallel, and faster than real time training. By simulating in a controlled environment, you are able to replicate real-world physics while approaching your end-goal efficiently
A robotics simulation is a virtual environment that mimics real-world physics, sensor feedback, and robot kinematics/dynamics. Simulations are built using engines like Gazebo, PyBullet, Isaac Sim, MuJoCo, or Webots, and often work with ROS/ROS2.
Simulation Worflow
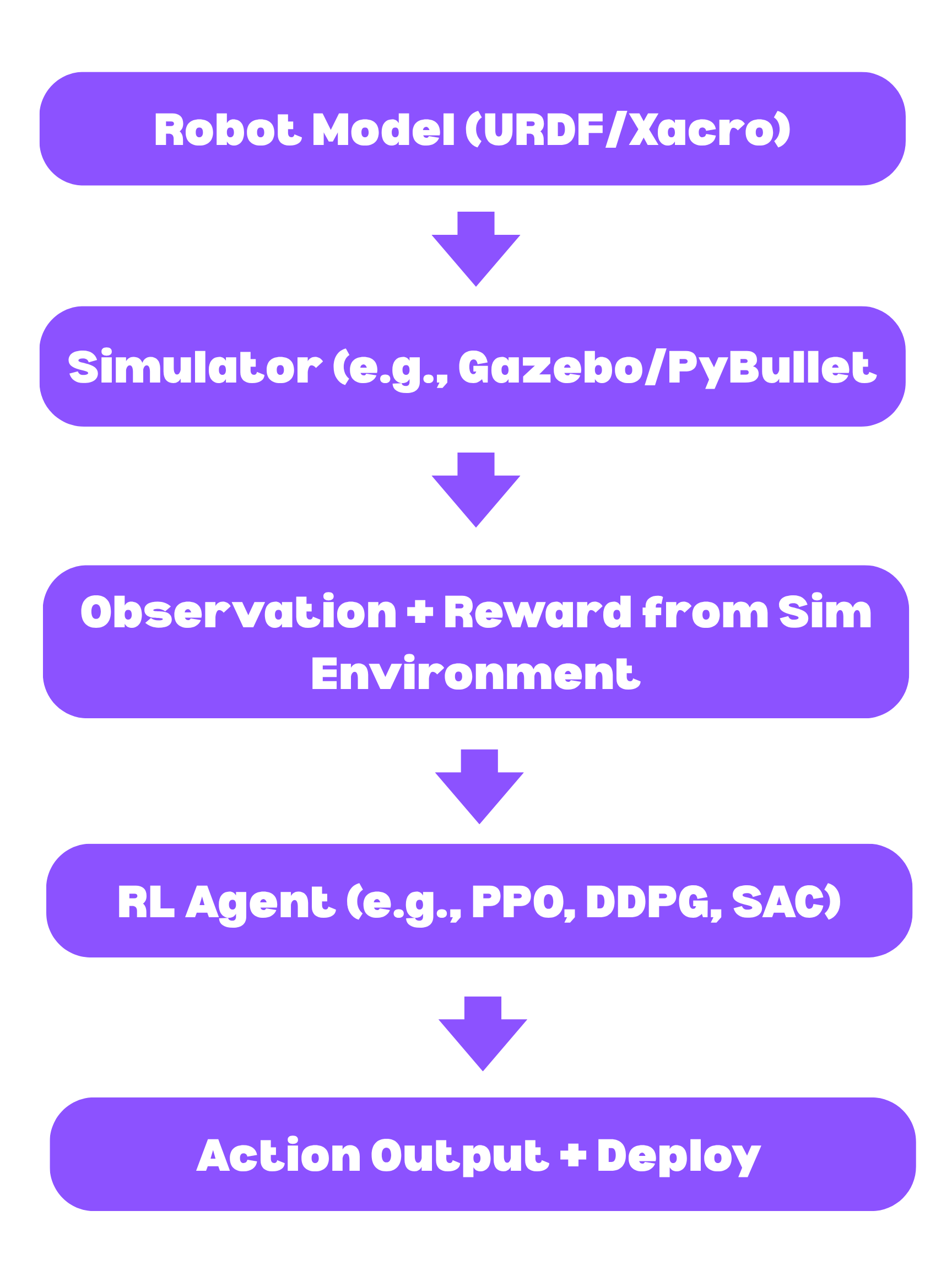
To simulate a robot with reinforcement learning, you always have a workflow planned on how to achieve your end goal. It begins my importing/modeling your robot and environment in a robotic simulator such as Isaac Sim, Gazebo, etc. Consider and tune to the physics of robot properties, as well as external inputs such as sensors(lidar, etc) if any. Then, set up an observation space, where at time-steps, your robot(reinforcement agent) is provided with these inputs(joints, sensor readings). These observations are feed to an FL algorithm depending on your interest, and decide to do an action based on the environment, where rewards are given based on success/failure. Continuously do this over many episodes to allow the robot to learn the reinforcement policy(algorithm) given, allowing for more efficient results. Additionally, you can accelerate training by running parallel, and even use domain randomization to improve the overall robustness. Once achieved, you can deploy the policy to a real-world robot(SIm2Real).
When deciding what policy you want for your robot, decide what the end goal(what you aim to achieve) and associate your policy on that. Additionally, the recommended simulator I would suggest is Isaac Sim, however, it requires at minimum a NVIDIA GeForce RTX 3070, with a 4080 as the recommended.
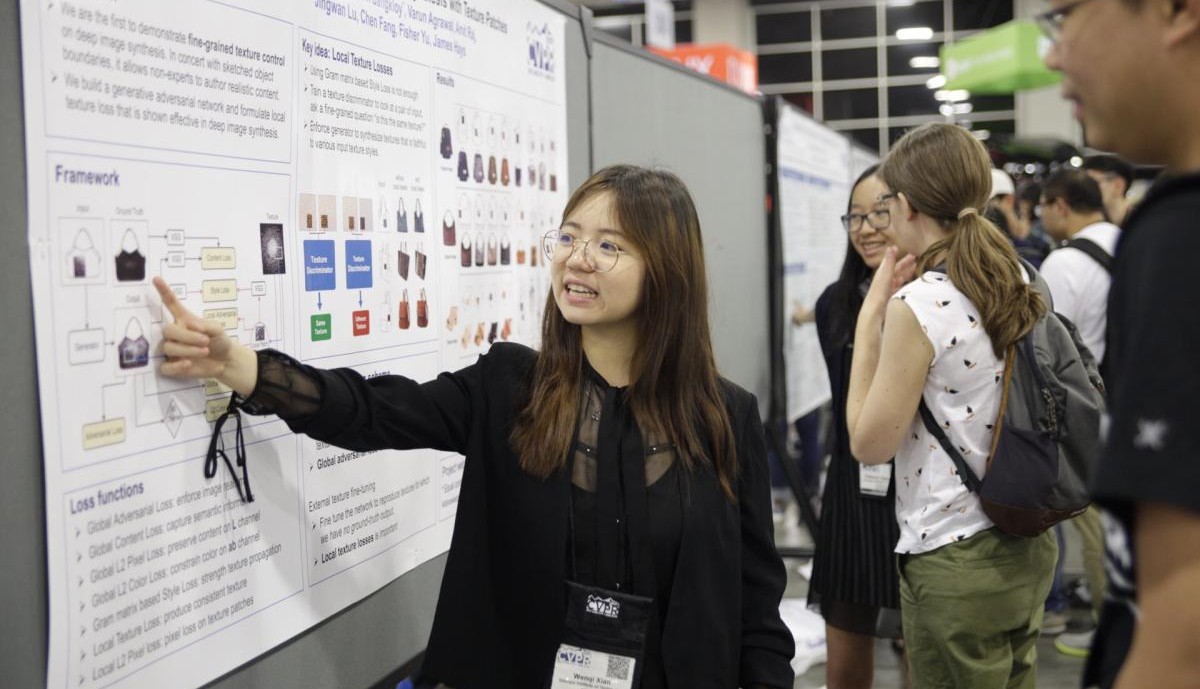
Research Headlines
Latest Breakthroughs in RL Research

RL With ALOHA

SERL

Multi-RL Swarm Nav
RL Localization
Event Headlines
Latest Breakthroughs in RL Research

RLC 2025

ICLR

The AI Conference

RL Conferences
InternSeeker
Figure out the Best Plan for You
Cover Letter
A cover letter is a formal document tailored to a specific company and role, highlighting your skills, experiences, and motivation for applying.
Read MoreCold Emails
A cold email is an unsolicited message you send directly to professionals or companies to introduce yourself and inquire about potential internship opportunities.
Read MoreInternSeeker
The InternSeeker tool lets users enter a location to instantly find robotics companies, showing their names, websites, and locations in a clean, searchable table.
Read More